BLHeli_32 version 32.9 release
New version 32.9 of the BLHeli_32 was released. This version has some interesting new features and fixes.
BLHeli_32?Rev32.9 changelog
- Added support for RPM controlled variable motor pwm frequency
- Added support for very high demag compensation
- Added support for adaptive low rpm power protection
- Modified relaxed stall protection mode to have no startup boost
- Greatly reduced noise level in the Dshot real time erpm data
- Improved rampup consistency, that helps make e.g. flip stops more precise
- Fixed a bug that caused MM32SPIN160 MCUs to occasionally hang
- Some smaller fixes
BLHeli_32?Rev32.9 changes in detail
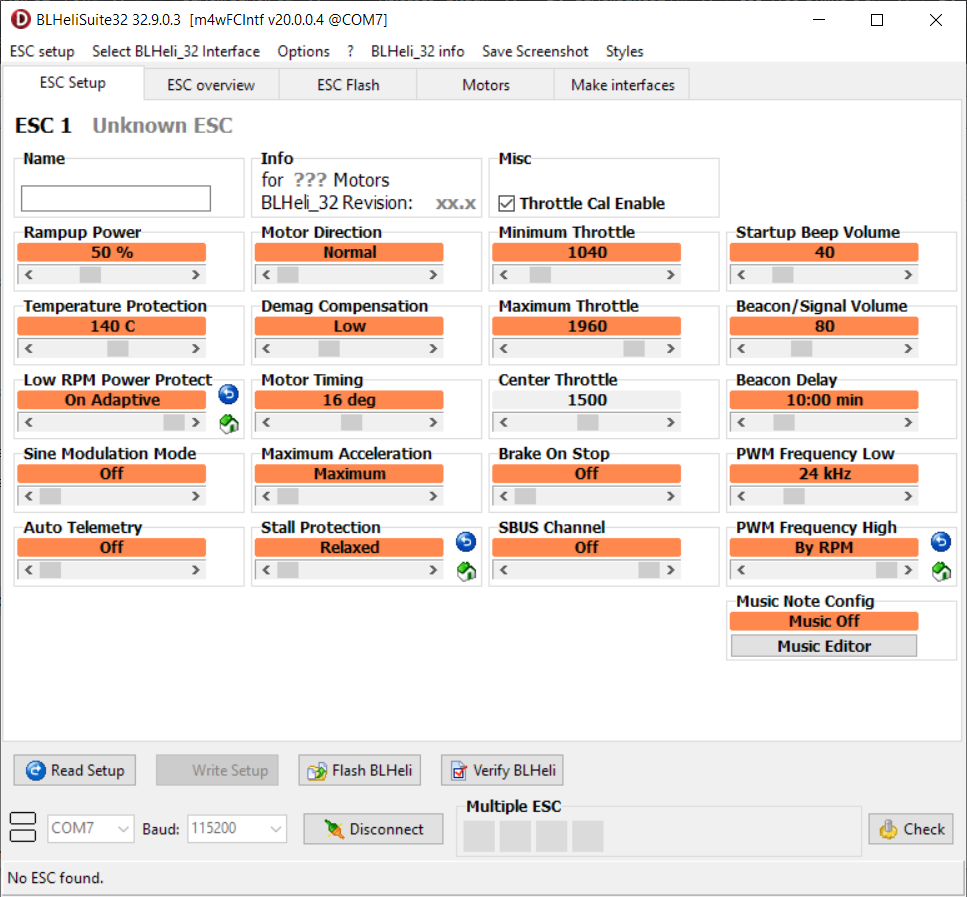
PWM frequency:
Code revisions from Rev32.9 and on support variable pwm frequency where the pwm
frequency is controlled by motor RPM. This mode is called “By RPM”.
This mode can be invoked by setting pwm high frequency to maximum.
By letting pwm frequency be controlled by RPM instead of throttle, some artifacts that can
arise from throttle control can be alleviated.
Demag Compensation:
Code revisions from Rev32.9 and on also support a setting called “Very High”, for which
power is cut even more aggressively.
Generally, a higher value of the compensation parameter gives better protection.
If demag compensation is set too high, maximum power can be somewhat reduced for some
motors.
Low RPM Power Protect:
Code revisions from Rev32.9 and on have a mode called “On Adaptive”. This setting is
intended for large low kV motors running on a fairly low battery voltage. But it can be used,
and is indeed suitable for any motor kV and battery voltage. In this mode, the code calculates
the kV*voltage and adjusts the low rpm power protection accordingly
Stall protection:
Code revisions from Rev32.9 and on have a tweak to the relaxed stall protection mode, where
there is no boost on startup for this mode. So if you are flying with really low throttle and the
motors stop e.g. due to reverse flow, then they will just gently start up again on the low
throttle.
You can download the BLHeli_32?suite from here:?https://github.com/bitdump/BLHeli/releases
Warning! Updating the firmware of almost any device can lead to the device being bricked or broken. You should carefully think before updating and taking the risks.??
Related Posts
-
 ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware,
ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware, -
 List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description
List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description